Projects from the Department of Mechanical Engineering
Team Members: Newton Obwocha, Hung Duong Phuong, Jagdeep Mann, Maninder Bansal, Sichun Xu
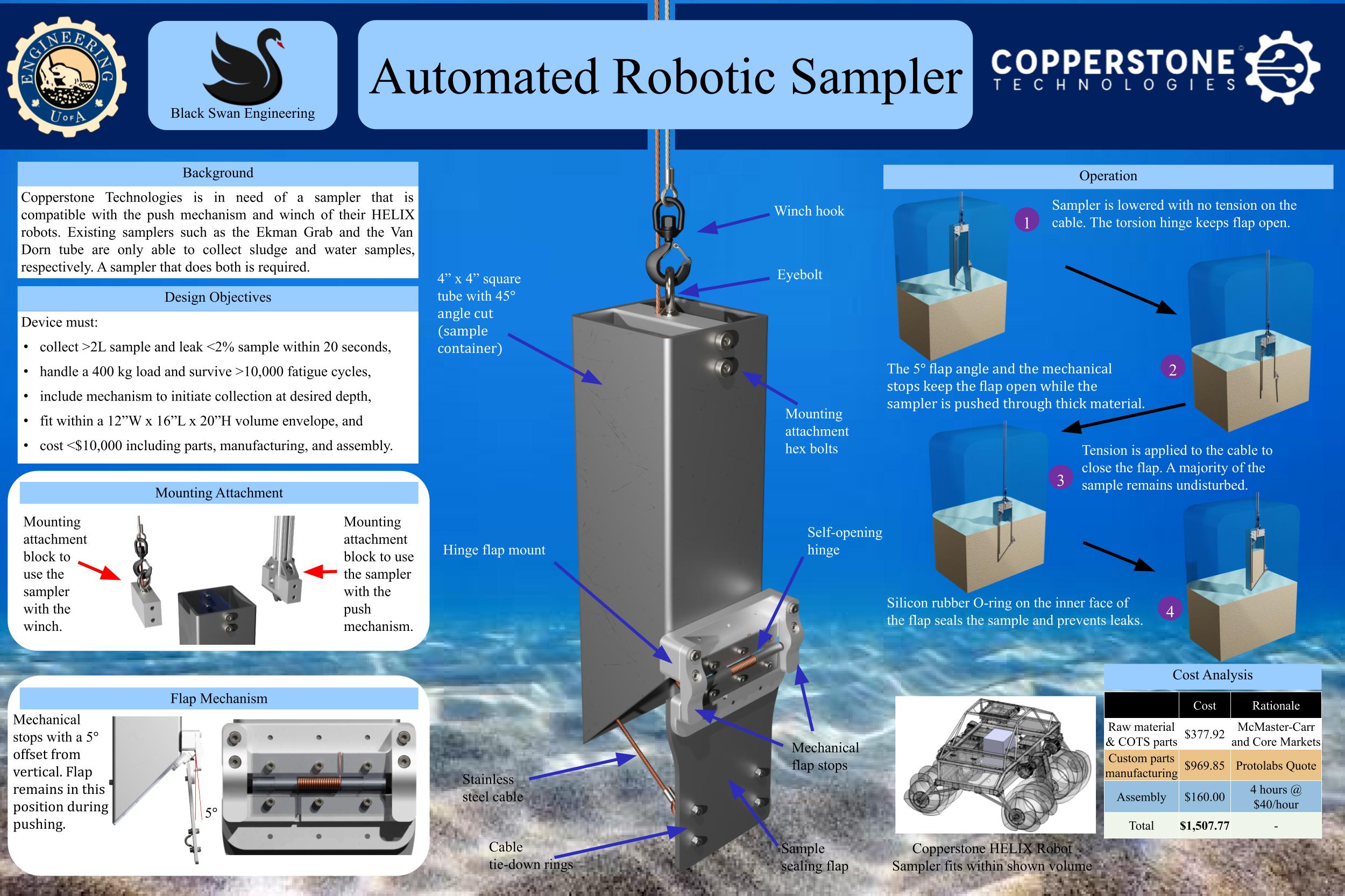
This was a project for Copperstone Technologies, a robotics company based in Edmonton, Alberta. They were in need of a sampler that is compatible with the push mechanism and winch of their HELIX robots. Existing samplers such as the Ekman Grab and the Van Dorn tube are only able to collect sludge and water samples, respectively. A sampler that does both is required.
Discipline:Mechanical Engineering
Explore
Explore projects from other disciplines!